训练和推理部分的代码使用tensorflow实现,环境安装请参考网络,这里主要对以下几点进行讲解。
- 提供完整的实现代码
- 对核心代码流程进行讲解
- 主要功能模块讲解
代码所在文件夹为selfDriveCarMD
drive.py 实现了采集数据和运行模型功能
1 |
|
train.py 实现了训练模型功能
1 |
|
modelTest.py 用于调试测试用,当训练完模型后可以用测试模型效果
1 |
|
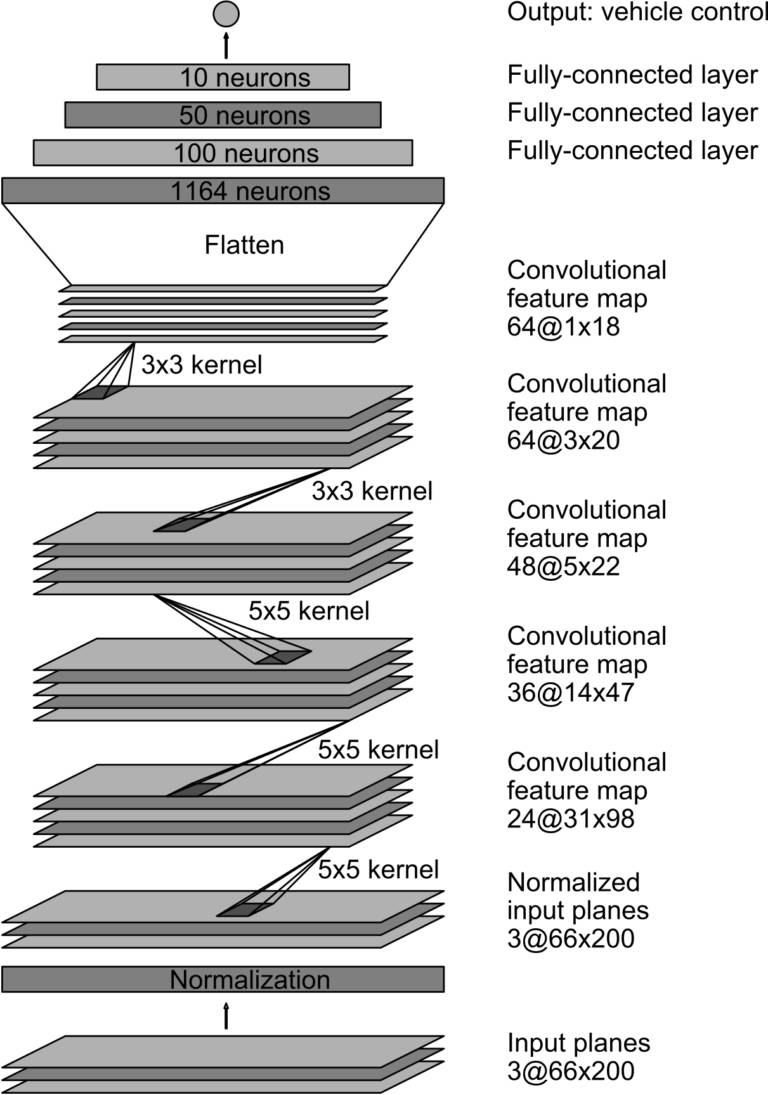
在baseModels文件夹里定义的是模型结构
1 |
|
models文件夹里放的是训练好的模型
nanoSDK文件夹里代码很多,主要用来实现数据和通讯相关的功能
- dataBuild.py 用来构建数据集
- dataStore.py 用来实现数据存储
- mecanumJoyStick.py 用来实现遥控器数据接收功能
- pymqtt.py 用来实现手机网页端与车之间的通讯
- webController.py 用来实现手机网页端的构建
processThread文件夹里的代码用来实现多线程功能
- CarManage.py 实现车线程管理总类
- dataStoreThread.py 定义数据采集存储线程类
- joyStickProcess.py 定义遥控器接收数据进程类
- SerialProcess.py 定义串口通讯进程类
- webControllerThread.py 定义网页图传控制传输线程类
tools文件夹定义相关工具类
- nanoTool.py 里边有树莓派csi摄像头驱动
- terminalPrint.py 实现终端自定义显示类