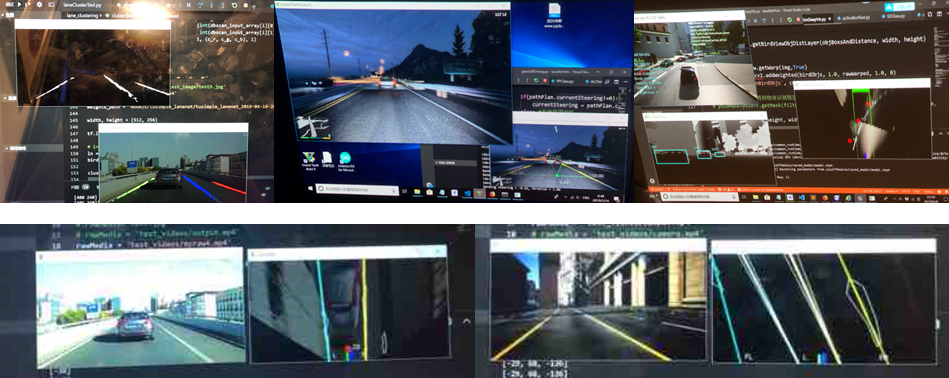
这里有一部分自动驾驶的测试视频
包括,车架硬件测试,实际道路的模拟器(airsim,GTAV)和行车记录仪视频
ESP32的图传遥控车,用于自动驾驶,自动驾驶神经网络处理在另一台主机,图传给主机处理再发送指令给小车。
[ESP32的图传遥控车]
预研Opencv, tensorflow, keras开始尝试做基于视觉的自动驾驶
用一个端到端神经网络实现了一个自动驾驶小车(树莓派):
Wifi图传,udp控制,本地存储标签数据,多线程,电机舵机驱动:
[乐高车架测试]
[飞思卡尔车架测试]
[一款车架测试]
侠盗车手测试:GTAV有个API插件,可以用python控制游戏里的车,这个视频在夜间自动驾驶,识别车道线通过车头中心点和车道线的垂直线和相交线来决策控制